Wie funktioniert ein bürstenloser Motor?
Bei sogenannten Brushless-Direct-Current (BLDC)-Motoren handelt es sich um einen dreiphasigen Synchronmotor mit permanenten Magneten. Die Drehbewegung kommt dadurch zustande, dass in den Statorwicklungen ein Drehfeld eingeprägt wird, welches den mit Magneten behafteten Rotor mitzieht. Trotzdem muss der BLDC-Motor über eine Elektronik mit Gleichstrom betrieben werden. Diese Elektronik passt die die Polarität der Spulen entsprechend an, wodurch die Kommutierung (anders als bei einem BDC-Motor) rein elektrisch und nicht mehr elektromechanisch stattfindet. Bei der Elektronik handelt es sich um eine H-Brücke, bei der jeweils zwei elektrische Schalter (meist MOSFETs oder IGBTs) für eine Phase zuständig sind.
Bei der Kommutierung wird zwischen der Blockkommutierung, bei der immer Spannungsblöcke auf die Spulen geschaltet werden, und der Sinuskommutierung, bei der die Spulen mit einer Sinusspannung beschaltet werden, unterschieden. Damit die elektrische Kommutierung problemlos abläuft, muss die Rotorposition zurückgeführt werden. Meistens wird die Rotorposition über drei Hall-Sensoren zurückgeführt, die elektrisch 120° zueinander verschoben sein müssen. Der Vorteil der Hall-Sensoren ist, dass sie sehr kostengünstig und zuverlässig sind. Durch die elektrische Kommutierung ist der benötigte Bauraum geringer, als bei den BDC-Motoren und der Wirkungsgrad steigt. Außerdem sind BLDC-Motoren sehr wartungsarm, da es keine Kohlebürsten gibt, die verschleißen.
Welche Baufromen gibt es?
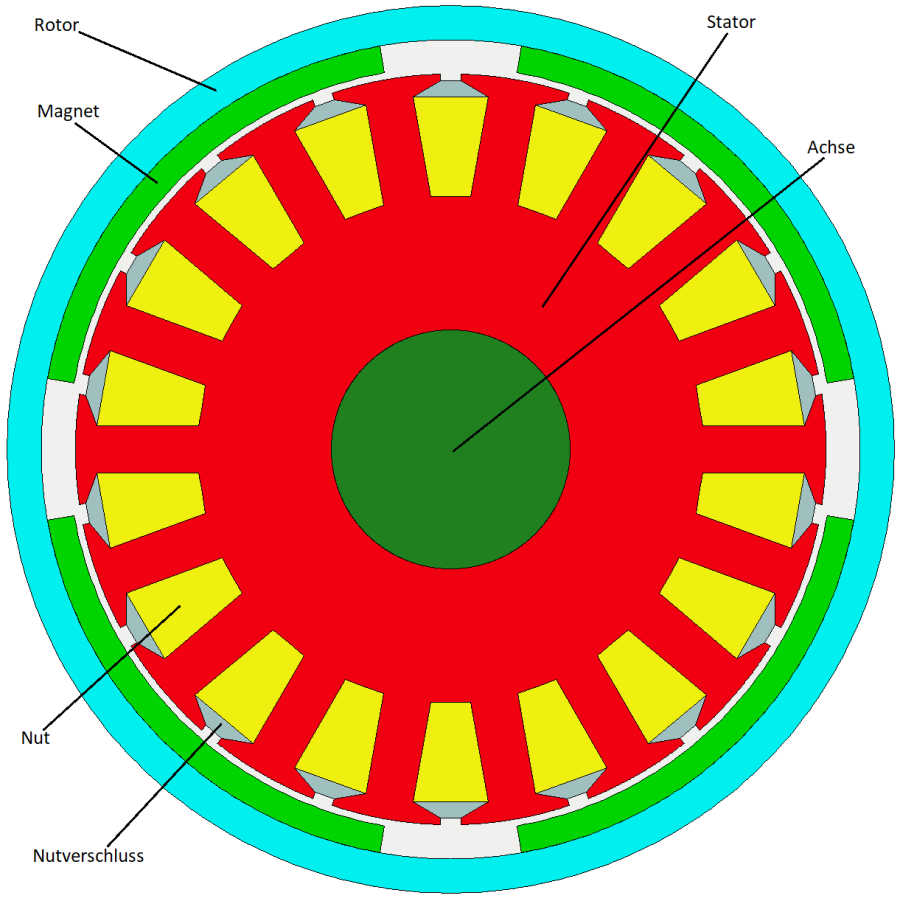
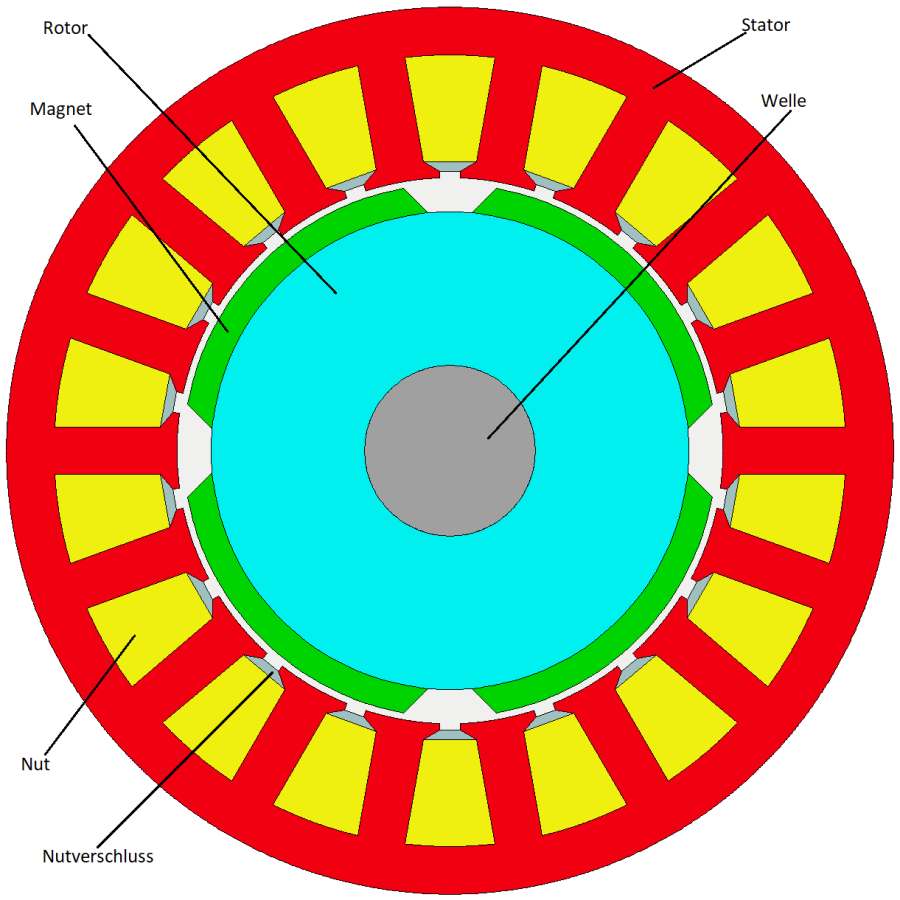
Der BLDC-Motor wird in zwei Bauformen ausgeführt, dem Innenläufer (siehe Abbildung 1) und dem Außenläufer (siehe Abbildung 2).
Wie ist ein Innenläufer aufgebaut?
Beim Innenläufer ist der Rotor im inneren des Stators, dadurch wirkt auf die im Rotor angebrachten Magnete die Fliehkraft nach außen, entgegen ihrer Befestigung. Beim Außenläufer hingegen wird der Rotor um den Stator angebracht. Somit wirkt die Fliehkraft auf die Magnete in Richtung ihrer Anbringung. Das heißt, die Magnete werden in den Rotor gedrückt. Je nach Anwendung kann zwischen einer der beiden Bauformen gewählt werden. Bei sehr hohen Drehzahlen muss beim Innenläufer darauf geachtet werden, dass sich die Magnete nicht vom Rotor lösen.
Wie funktioniert ein Außenläufer?
Bei Torque-Motoren handelt es sich um hochpolige BLDC-Motoren mit einer hohen Leistungsdichte. Sie haben ein hohes Drehmoment und werden daher oft als Direktantriebe in der Außenläufer-Variante verwendet. Der Vorteil dabei ist, dass oft keine zusätzliche Kühlung notwendig ist, da durch die natürliche Außenrotation der Motor gekühlt wird. Zusätzlich kann auf ein Getriebe verzichtet werden, wodurch der Gesamtwirkungsgrad ansteigt.